Figure 1: “Interactive Fleet Knowing” (IFL) describes robotic fleets in market and academic community that draw on human teleoperators when needed and continuously gain from them with time.
In the last couple of years we have actually seen an amazing advancement in robotics and expert system: big fleets of robotics have actually left the laboratory and got in the real life. Waymo, for instance, has more than 700 self-driving vehicles running in Phoenix and San Francisco and is presently broadening to Los Angeles Other commercial implementations of robotic fleets consist of applications like e-commerce order satisfaction at Amazon and Ambi Robotics along with food shipment at Nuro and Kiwibot

Industrial and commercial implementations of robotic fleets: bundle shipment (leading left), food shipment (bottom left), e-commerce order satisfaction at Ambi Robotics (leading right), self-governing taxis at Waymo (bottom right).
These robotics utilize current advances in deep discovering to run autonomously in disorganized environments. By pooling information from all robotics in the fleet, the whole fleet can effectively gain from the experience of each private robotic. Additionally, due to advances in cloud robotics, the fleet can unload information, memory, and calculation (e.g., training of big designs) to the cloud by means of the Web. This technique is called “Fleet Knowing,” a term promoted by Elon Musk in 2016 press launches about Tesla Auto-pilot and utilized in press interactions by Toyota Research Study Institute, Wayve AI, and others. A robotic fleet is a modern-day analogue of a fleet of ships, where the word fleet has an etymology tracing back to flÄot (‘ ship’) and flÄotan (‘ float’) in Old English.
Data-driven techniques like fleet knowing, nevertheless, deal with the issue of the ” long tail”: the robotics undoubtedly come across brand-new circumstances and edge cases that are not represented in the dataset. Naturally, we can’t anticipate the future to be the like the previous! How, then, can these robotics business make sure adequate dependability for their services?
One response is to draw on remote people online, who can interactively take control and “tele-operate” the system when the robotic policy is undependable throughout job execution. Teleoperation has an abundant history in robotics: the world’s very first robotics were teleoperated throughout WWII to deal with radioactive products, and the Telegarden originated robotic control online in 1994. With continuous knowing, the human teleoperation information from these interventions can iteratively enhance the robotic policy and minimize the robotics’ dependence on their human managers with time. Instead of a discrete dive to complete robotic autonomy, this technique provides a constant option that approaches complete autonomy with time while all at once making it possible for dependability in robotic systems today
Using human teleoperation as a fallback system is progressively popular in modern-day robotics business: Waymo calls it ” fleet action,” Zoox calls it ” TeleGuidance,” and Amazon calls it ” continuous knowing.” In 2015, a software application platform for remote driving called Phantom Car was acknowledged by Time Publication as one of their Leading 10 Developments of 2022 And simply last month, John Deere obtained SparkAI, a start-up that establishes software application for solving edge cases with people in the loop.

A remote human teleoperator at Phantom Car, a software application platform for making it possible for remote driving online.
In spite of this growing pattern in market, nevertheless, there has actually been relatively little concentrate on this subject in academic community. As an outcome, robotics business have actually needed to depend on advertisement hoc services for figuring out when their robotics must deliver control. The closest analogue in academic community is interactive replica knowing (IIL), a paradigm in which a robotic periodically delivers control to a human manager and gains from these interventions with time. There have actually been a variety of IIL algorithms over the last few years for the single-robot, single-human setting consisting of DAgger and versions such as HG-DAgger, SafeDAgger, EnsembleDAgger, and ThriftyDAgger; nonetheless, when and how to change in between robotic and human control is still an open issue. This is even less comprehended when the concept is generalized to robotic fleets, with several robotics and several human managers.
IFL Formalism and Algorithms
To this end, in a current paper at the Conference on Robotic Knowing we presented the paradigm of Interactive Fleet Knowing (IFL), the very first formalism in the literature for interactive knowing with several robotics and several people. As we have actually seen that this phenomenon currently takes place in market, we can now utilize the expression “interactive fleet knowing” as combined terms for robotic fleet discovering that draws on human control, instead of keep an eye on the names of every private business service (” fleet action”, “TeleGuidance”, and so on). IFL scales up robotic knowing with 4 crucial elements:
- On-demand guidance. Considering that people can not efficiently keep track of the execution of several robotics simultaneously and are susceptible to tiredness, the allotment of robotics to people in IFL is automated by some allotment policy $omega$. Guidance is asked for “on-demand” by the robotics instead of putting the problem of constant tracking on the people.
- Fleet guidance. On-demand guidance allows efficient allotment of minimal human attention to big robotic fleets. IFL enables the variety of robotics to considerably surpass the variety of people (e.g., by an element of 10:1 or more).
- Continuous knowing. Each robotic in the fleet can gain from its own errors along with the errors of the other robotics, enabling the quantity of needed human guidance to lessen with time.
- The Web. Thanks to grow and ever-improving Web innovation, the human managers do not require to be physically present. Modern computer system networks make it possible for real-time remote teleoperation at huge ranges.
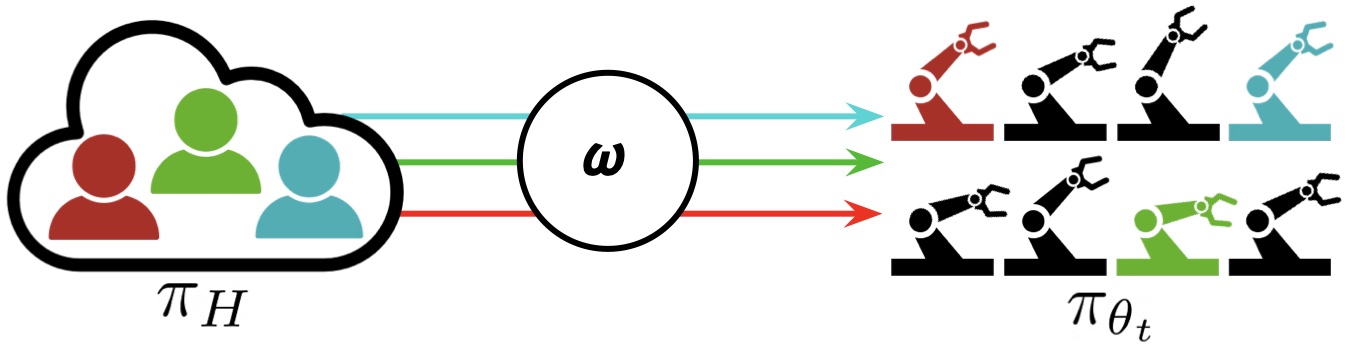
In the Interactive Fleet Knowing (IFL) paradigm, M people are designated to the robotics that require the most assist in a fleet of N robotics (where N can be much bigger than M). The robotics share policy $pi _ {theta_t} $ and gain from human interventions with time.
We presume that the robotics share a typical control policy $pi _ {theta_t} $ which the people share a typical control policy $pi_H$. We likewise presume that the robotics run in independent environments with similar state and action areas (however not similar states). Unlike a robotic swarm of usually affordable robotics that collaborate to accomplish a typical goal in a shared environment, a robotic fleet all at once performs a shared policy in unique parallel environments (e.g., various bins on an assembly line).
The objective in IFL is to discover an optimum manager allotment policy $omega$, a mapping from $mathbf {s} ^ t$ (the state of all robotics sometimes t) and the shared policy $pi _ {theta_t} $ to a binary matrix that shows which human will be designated to which robotic sometimes t The IFL goal is an unique metric we call the “return on human effort” (ROHE):
[max_{omega in Omega} mathbb{E}_{tau sim p_{omega, theta_0}(tau)} left[frac{M}{N} cdot frac{sum_{t=0}^T bar{r}( mathbf{s}^t, mathbf{a}^t)}{1+sum_{t=0}^T |omega(mathbf{s}^t, pi_{theta_t}, cdot) |^2 _F} right]]
where the numerator is the overall benefit throughout robotics and timesteps and the denominator is the overall quantity of human actions throughout robotics and timesteps. Intuitively, the ROHE determines the efficiency of the fleet stabilized by the overall human guidance needed. See the paper for more of the mathematical information.
Utilizing this formalism, we can now instantiate and compare IFL algorithms (i.e., allotment policies) in a principled method. We propose a household of IFL algorithms called Fleet-DAgger, where the policy knowing algorithm is interactive replica knowing and each Fleet-DAgger algorithm is parameterized by a special concern function $hat p: (s, pi _ {theta_t}) rightarrow [0, infty)$ that each robot in the fleet uses to assign itself a priority score. Similar to scheduling theory, higher priority robots are more likely to receive human attention. Fleet-DAgger is general enough to model a wide range of IFL algorithms, including IFL adaptations of existing single-robot, single-human IIL algorithms such as EnsembleDAgger and ThriftyDAgger. Note, however, that the IFL formalism isnât limited to Fleet-DAgger: policy learning could be performed with a reinforcement learning algorithm like PPO, for instance.
IFL Benchmark and Experiments
To determine how to best allocate limited human attention to large robot fleets, we need to be able to empirically evaluate and compare different IFL algorithms. To this end, we introduce the IFL Benchmark, an open-source Python toolkit available on Github to facilitate the development and standardized evaluation of new IFL algorithms. We extend NVIDIA Isaac Gym, a highly optimized software library for end-to-end GPU-accelerated robot learning released in 2021, without which the simulation of hundreds or thousands of learning robots would be computationally intractable. Using the IFL Benchmark, we run large-scale simulation experiments with N = 100 robots, M = 10 algorithmic humans, 5 IFL algorithms, and 3 high-dimensional continuous control environments (Figure 1, left).
We also evaluate IFL algorithms in a real-world image-based block pushing task with N = 4 robot arms and M = 2 remote human teleoperators (Figure 1, right). The 4 arms belong to 2 bimanual ABB YuMi robots operating simultaneously in 2 separate labs about 1 kilometer apart, and remote humans in a third physical location perform teleoperation through a keyboard interface when requested. Each robot pushes a cube toward a unique goal position randomly sampled in the workspace; the goals are programmatically generated in the robotsâ overhead image observations and automatically resampled when the previous goals are reached. Physical experiment results suggest trends that are approximately consistent with those observed in the benchmark environments.
Takeaways and Future Directions
To address the gap between the theory and practice of robot fleet learning as well as facilitate future research, we introduce new formalisms, algorithms, and benchmarks for Interactive Fleet Learning. Since IFL does not dictate a specific form or architecture for the shared robot control policy, it can be flexibly synthesized with other promising research directions. For instance, diffusion policies, recently demonstrated to gracefully handle multimodal data, can be used in IFL to allow heterogeneous human supervisor policies. Alternatively, multi-task language-conditioned Transformers like RT-1 and PerAct can be effective âdata spongesâ that enable the robots in the fleet to perform heterogeneous tasks despite sharing a single policy. The systems aspect of IFL is another compelling research direction: recent developments in cloud and fog robotics enable robot fleets to offload all supervisor allocation, model training, and crowdsourced teleoperation to centralized servers in the cloud with minimal network latency.
While Moravecâs Paradox has so far prevented robotics and embodied AI from fully enjoying the recent spectacular success that Large Language Models (LLMs) like GPT-4 have demonstrated, the âbitter lessonâ of LLMs is that supervised learning at unprecedented scale is what ultimately leads to the emergent properties we observe. Since we donât yet have a supply of robot control data nearly as plentiful as all the text and image data on the Internet, the IFL paradigm offers one path forward for scaling up supervised robot learning and deploying robot fleets reliably in todayâs world.
This post is based on the paper âFleet-DAgger: Interactive Robot Fleet Learning with Scalable Human Supervisionâ by Ryan Hoque, Lawrence Chen, Satvik Sharma, Karthik Dharmarajan, Brijen Thananjeyan, Pieter Abbeel, and Ken Goldberg, presented at the Conference on Robot Learning (CoRL) 2022. For more details, see the paper on arXiv, CoRL presentation video on YouTube, open-source codebase on Github, high-level summary on Twitter, and project website.
If you would like to cite this article, please use the following bibtex:
@article{ifl_blog,
title={Interactive Fleet Learning},
author={Hoque, Ryan},
url={https://bair.berkeley.edu/blog/2023/04/06/ifl/},
journal={Berkeley Artificial Intelligence Research Blog},
year={2023}
}
.